Many of us already make use of partially autonomous technologies such as cruise control and lane control while driving. While it may be some time before driverless cars can be entirely trusted to replace human control, these familiar systems are being constantly improved in order for our trust in them to be deepened.

The latest Lexus LS already contains the industry’s most advanced versions of these production systems, both of which can be used in isolation or in conjunction with each other.
For example, its Lane-Keeping Assist (LKA) system was recently upgraded to include a yaw rate feedback control that adjusts steering torque and speed to take into account external issues such as lateral road camber and crosswinds. Combined with a stereo imaging camera that monitors white line road markings, LKA analyses the vehicle’s position within the driving lane and is poised to respond to potentially dangerous situations.
Meanwhile, Adaptive Cruise Control (ACC) in the latest LS has two functions; that of maintaining a constant speed and controlling vehicle-to-vehicle distance. This latter feature is possible thanks to a millimetre-wave radar that senses when the car in front slows down or speeds up, actioning ACC to react by either applying the brakes to maintain a safe distance or accelerating back to a preset speed.
Now, however, we are pleased to report on next-generation versions of these systems that have been developed by Toyota Motor Corporation.
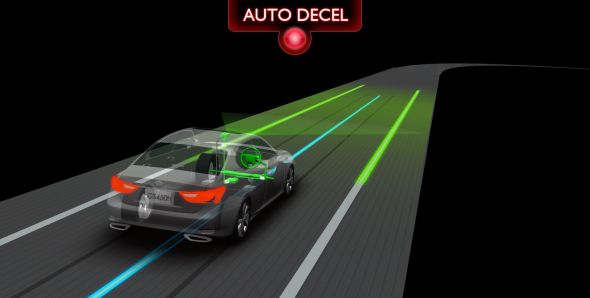
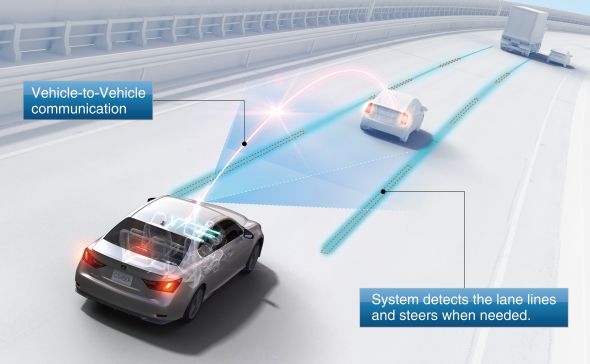
The new Lane Trace Control (LTC) system uses a triumvirate of high-performance cameras, millimetre-wave radar and control software to adjust the vehicle’s steering angle, driving torque and braking force to maintain an optimal line within the lane. Compared to LKA, which applied some steering correction within the lane and around gentle curves, LTC scans much further ahead to detect sharper curves and then activates the brakes to slow the car down. This preparation allows the vehicle to maintain an optimal position within the lane, irrespective of its radius.

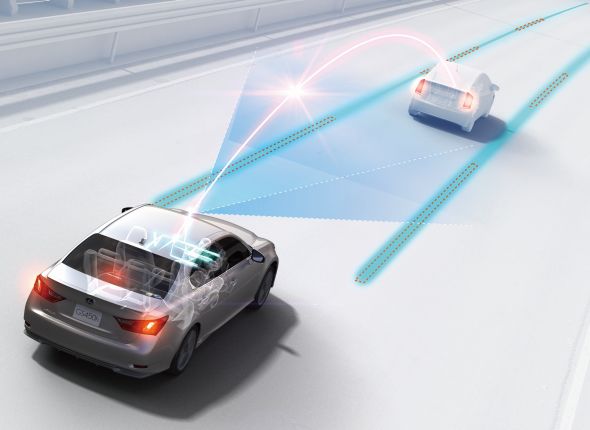
The change from ACC to the new Cooperative-Adaptive Cruise Control (C-ACC) adds an important extra layer of monitoring to the system. As well as using standard millimetre-wave radar to monitor the vehicle’s position relative to the car ahead, C-ACC uses 700-MHz band vehicle-to-vehicle communications to transmit data from the car in front to those behind.

Although the radar setup alone was relatively fast-reacting, it still produced a concertina effect as the system tried to maintain a safe inter-vehicle distance. This, however, delivers a near instantaneous response, thereby eliminating unnecessary acceleration and deceleration.

Both of these systems are currently being thoroughly tested to support safer road use, and we may very well see these upgrades in future Lexus production vehicles.